





Sampling-based planning of actions and motions using approximate solutions
GACR funding
People: V. Vonasek, R. Penicka, D. Fiser
 |
 |
 |
|
Toys scenario. Each object can be moved only by the corresponding window |
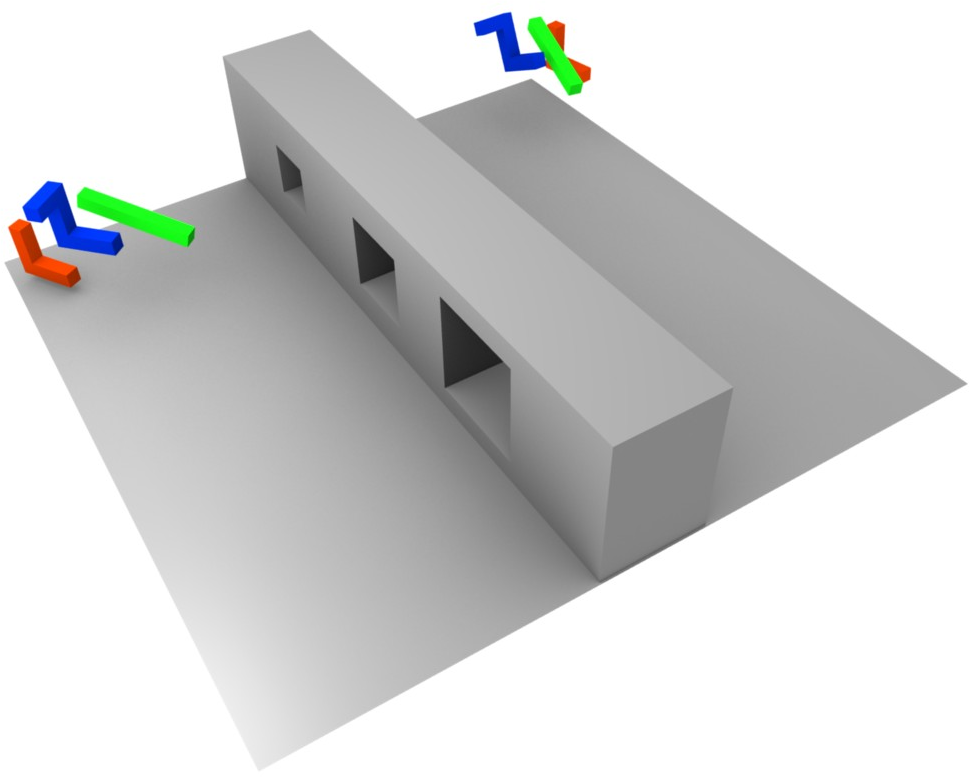
Windows scenario with simple L-shaped, I-shaped and S-shaped objects |
Hedgehog in the cage benchmark |
 |
 |
 |
| 1st solution | 2nd solution | 3rd solution |
J Janoš, V Vonásek and R Pěnička. Multi-Goal Path Planning Using Multiple Random Trees. IEEE Robotics and Automation Letters 6(2):4201-4208, April 2021. URL arXiv, DOI BibTeX
@article{janos2021multigoal, author = "J. {Jano\v{s}} and V. {Von\'{a}sek} and R. {P\v{e}ni\v{c}ka}", journal = "IEEE Robotics and Automation Letters", title = "Multi-Goal Path Planning Using Multiple Random Trees", year = 2021, month = "April", volume = 6, number = 2, pages = "4201-4208", doi = "10.1109/LRA.2021.3068679", url = "https://ieeexplore.ieee.org/document/9385932", arxiv = "http://arxiv.org/abs/2106.03407" }D Fiser, R Horcík and A Komenda. Strengthening Potential Heuristics with Mutexes and Disambiguations. In Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling. 2020, 124-133. BibTeX
@inproceedings{fiser2020strengthening, author = "Fiser, D. and Horcík, R. and Komenda, A.", title = "Strengthening Potential Heuristics with Mutexes and Disambiguations", booktitle = "Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling", publisher = "Menlo Park: AAAI Press", year = 2020, pages = "124-133", issn = "2334-0835", isbn = "978-1-57735-824-4" }V Vonásek, R Pěnička and B Kozlíková. Searching Multiple Approximate Solutions in Configuration Space to Guide Sampling-Based Motion Planning. Journal of Intelligent & Robotic Systems 100:1547-1543, 2020. DOI BibTeX
@article{vonasek2020searching, author = "Von{\'a}sek, V. and R. P\v{e}ni\v{c}ka and Kozl{\'i}kov{\'a}, B.", title = "Searching Multiple Approximate Solutions in Configuration Space to Guide Sampling-Based Motion Planning", journal = "Journal of Intelligent {\&} Robotic Systems", pages = "1547-1543", volume = 100, issue = 3, year = 2020, doi = "https://doi.org/10.1007/s10846-020-01247-4" }V Vonásek, R Pěnička and B Kozlı\'ková. Computing multiple guiding paths for sampling-based motion planning. In 2019 19th International Conference on Advanced Robotics (ICAR) (). December 2019, 374-381. PDF, DOI BibTeX
@inproceedings{vonasek2019computing, author = "V. {Vonásek} and R. {P\v{e}ni\v{c}ka} and B. {Kozl\i{\'}kov\'{a}}", booktitle = "2019 19th International Conference on Advanced Robotics (ICAR)", title = "Computing multiple guiding paths for sampling-based motion planning", year = 2019, volume = "", number = "", pages = "374-381", keywords = "iterative methods;mobile robots;path planning;probability;sampling-based planners;narrow passage problem;random samples;guided-based planners;six-dimensional configuration space;guided sampling;multiple approximate solutions;multiple narrow passages;multiple guiding paths;sampling-based motion planning;path planning;3D solid objects", doi = "10.1109/ICAR46387.2019.8981589", issn = "null", month = "Dec", pdf = "data/papers/vonasek-icar19-multiple.pdf" }V Vonásek and R Pěnička. Sampling-based motion planning of 3D solid objects guided by multiple approximate solutions. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (). November 2019, 1480-1487. PDF, DOI BibTeX
@inproceedings{vonasek2019iros, author = "V. {Vonásek} and R. {P\v{e}ni\v{c}ka}", booktitle = "2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)", title = "Sampling-based motion planning of 3D solid objects guided by multiple approximate solutions", year = 2019, volume = "", number = "", pages = "1480-1487", keywords = "", doi = "10.1109/IROS40897.2019.8968578", issn = "2153-0858", month = "Nov", pdf = "data/papers/vonasek-iros-2019.pdf" }M Petrlik, V Vonasek and M Saska. Coverage Optimization in the Cooperative Surveillance Task using Multiple Micro Aerial Vehicles. In 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC). October 2019. PDF BibTeX
@inproceedings{petrlik2019smc, author = "M. {Petrlik} and V. {Vonasek} and M. {Saska}", booktitle = "2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC)", title = "Coverage Optimization in the Cooperative Surveillance Task using Multiple Micro Aerial Vehicles", year = 2019, month = "Oct", pdf = "data/papers/petrlik2019smc.pdf" }V Vonásek and R Pěnička. Space-filling forest for multi-goal path planning. In 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). 2019, 1587-1590. PDF, DOI BibTeX
@inproceedings{vonasek_etfa19_SFF_multigoal, author = "V. {Vonásek} and R. {Pěnička}", booktitle = "2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)", title = "Space-filling forest for multi-goal path planning", year = 2019, pages = "1587-1590", keywords = "Vegetation;Path planning;Planning;Robots;Task analysis;Forestry;Two dimensional displays", doi = "10.1109/ETFA.2019.8869521", month = "Sep.", pdf = "data/papers/vonasek-etfa-2019-multigoal-sff.pdf" }V Vonásek and R Pěnička. Path planning of 3D solid objects using approximate solutions. In 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). 2019, 593-600. PDF, DOI BibTeX
@inproceedings{vonasek_etfa19_3Dplanning, author = "V. {Vonásek} and R. {Pěnička}", booktitle = "2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)", title = "Path planning of 3D solid objects using approximate solutions", year = 2019, pages = "593-600", keywords = "Robots;Geometry;Collision avoidance;Planning;Three-dimensional displays;Solids;Path planning", doi = "10.1109/ETFA.2019.8869344", month = "Sep.", pdf = "data/papers/vonasek-etfa-2019-rrt-iis-peeling.pdf" }V Vonásek and R Pěnička. Computation of Approximate Solutions for Guided Sampling-Based Motion Planning of 3D Objects. In 2019 12th International Workshop on Robot Motion and Control (RoMoCo). July 2019, 231-238. PDF, DOI BibTeX
@inproceedings{vonasek_romoco19_app_guided_sampling, author = "V. {Vonásek} and R. {Pěnička}", booktitle = "2019 12th International Workshop on Robot Motion and Control (RoMoCo)", title = "Computation of Approximate Solutions for Guided Sampling-Based Motion Planning of 3D Objects", year = 2019, pages = "231-238", keywords = "collision avoidance;graph theory;mobile robots;path planning;sampling methods;search problems;collision-free samples;narrow passage problem;approximate solution;guided sampling-based motion planning;3D solid objects;graph-search methods;6D configuration space;iterative guiding process;Planning;Surface treatment;Collision avoidance;Three-dimensional displays;Legged locomotion;Solids", doi = "10.1109/RoMoCo.2019.8787344", month = "July", pdf = "data/papers/vonasek-romoco-2019-rrt-iis.pdf" }




